General
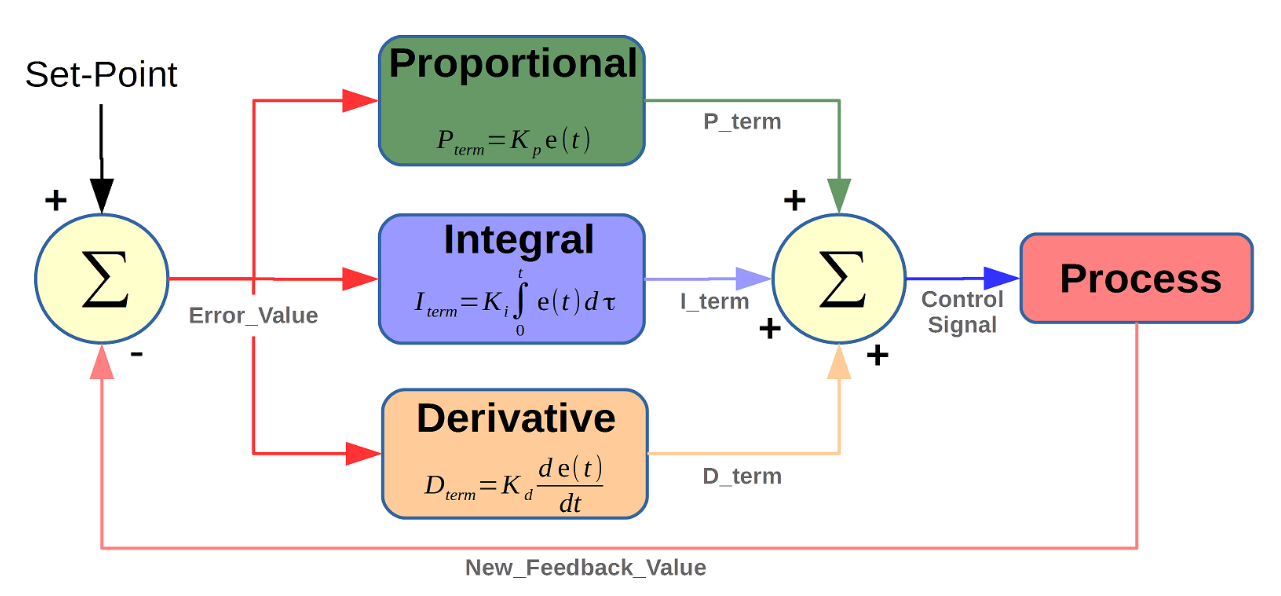
The semf::PidController class is a discrete proportional integral derivative controller. It is sued to calculate the output for a controlled system.
PidController
A bunch of parameters has to be given to the object’s constructor:
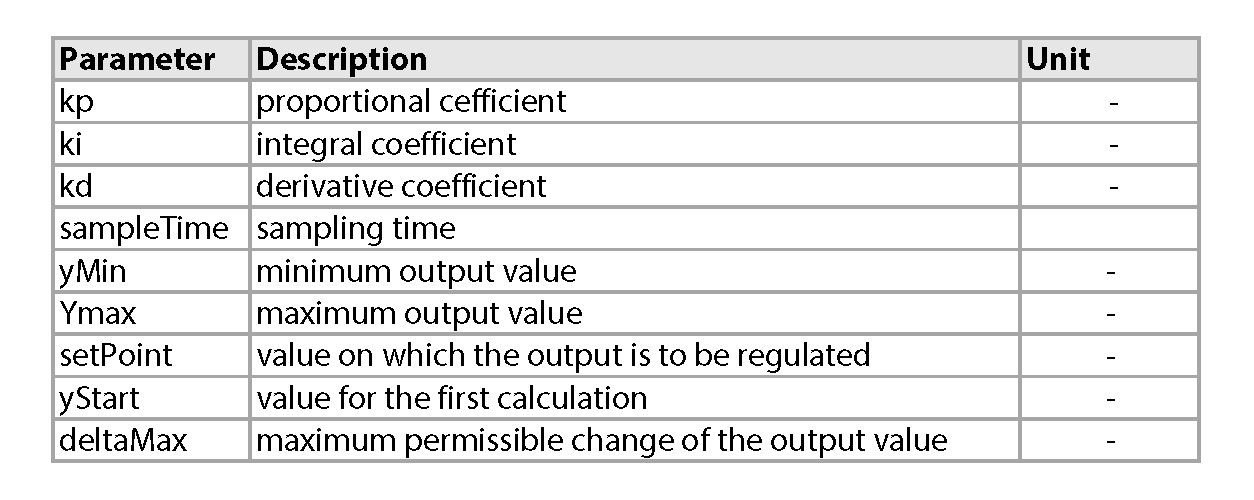
Parameters PidController
Initialization and Usage
#include "semf/utils/ processing/pidcontroller.h"
double processOutput = 0;
double processInput = 0;
while(true)
{
processOutput += 0.1;
processInput = pid.calculate(processOutput);
}
Implementation of an pid (proportional integral derivative) regulator.