|
semf
|
|
semf
|
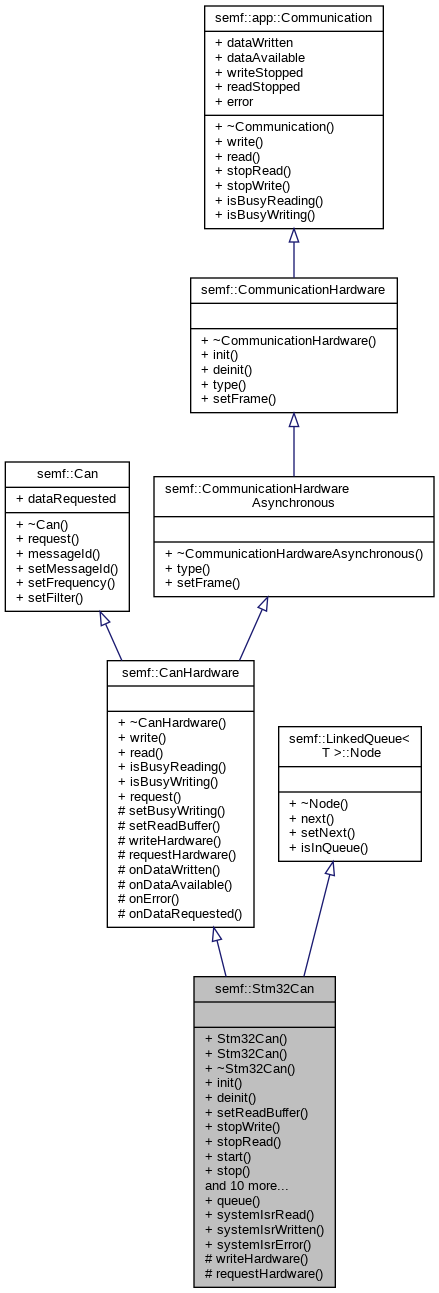
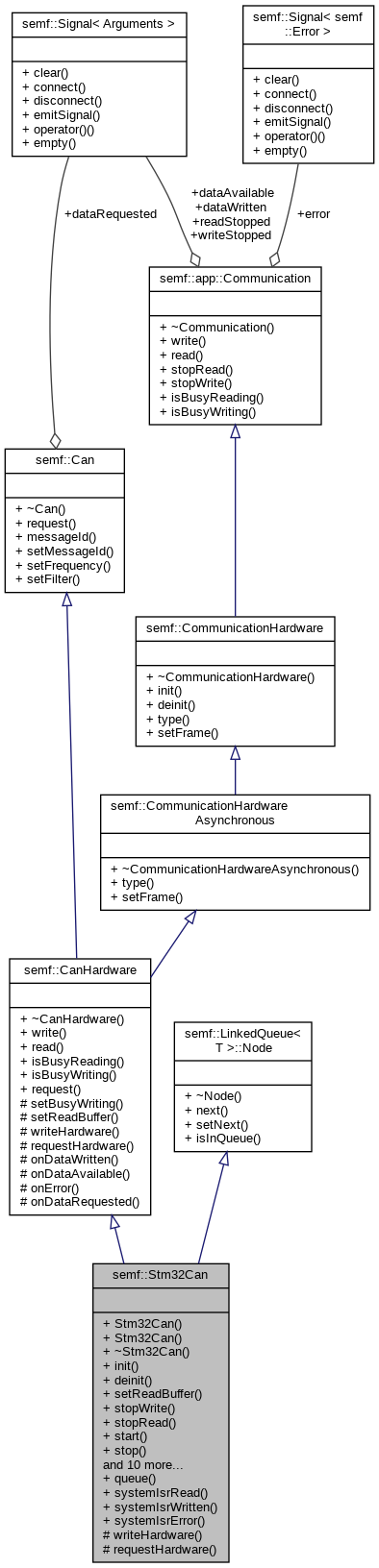
Class for using CAN with Stm32. More...
#include <stm32can.h>
Public Member Functions | |
| Stm32Can (CAN_HandleTypeDef &hwHandle) | |
| Constructor. More... | |
| Stm32Can (const Stm32Can &other)=delete | |
| virtual | ~Stm32Can ()=default |
| void | init () override |
| void | deinit () override |
| void | setReadBuffer (uint8_t buffer[], size_t bufferSize) override |
| Sets the read buffer for having the possibility to handle the received data. More... | |
| void | stopWrite () override |
| void | stopRead () override |
| void | start () |
| Hardware driver will be started. More... | |
| void | stop () |
| Hardware driver will be stopped. More... | |
| bool | isStarted () const |
| Get the state of the start of the CAN driver. More... | |
| uint32_t | messageId () const override |
| Returns the message ID for reading data. Use this function after reading the data via read-function. More... | |
| void | setMessageId (uint32_t id) override |
| Sets the message ID for writing data. Use this function before writing the data via write-function. More... | |
| void | setFrequency (uint32_t hz) override |
| Sets the speed. More... | |
| void | setFilter (uint32_t filterBank, uint32_t messageId, uint32_t messageIdMask) override |
| Sets a message hardware receive filter. More... | |
| void | enterDeepPowerDownMode () |
| Go to deep power down mode. More... | |
| void | releaseDeepPowerDownMode () |
| Go to active mode. More... | |
| void | isrRead (CAN_HandleTypeDef &can, uint8_t fifoId) |
Saves a received message and sends a readyRead or readyRequested signal. More... | |
| void | isrWritten (CAN_HandleTypeDef &can, uint8_t mailboxId) |
Sending a readyWritten signal. More... | |
| void | isrError (CAN_HandleTypeDef &can) |
Sending a error signal. More... | |
 Public Member Functions inherited from semf::CanHardware Public Member Functions inherited from semf::CanHardware | |
| virtual | ~CanHardware ()=default |
| void | write (const uint8_t data[], size_t dataSize) override |
For writing data, dataWritten signal will be emitted after successful write. More... | |
| void | read (uint8_t buffer[], size_t bufferSize) override |
For setting the read buffer. This has be done for getting a dataAvailable signal for handling the data. More... | |
| bool | isBusyReading () const override |
| Communication hardware is busy reading at the moment. More... | |
| bool | isBusyWriting () const override |
| Communication hardware is busy writing at the moment. More... | |
| void | request () override |
| Public Member Functions inherited from semf::Can | |
| virtual | ~Can ()=default |
| virtual void | request ()=0 |
| virtual uint32_t | messageId () const =0 |
| Returns the message ID for reading data. Use this function after reading the data via read-function. More... | |
| virtual void | setMessageId (uint32_t id)=0 |
| Sets the message ID for writing data. Use this function before writing the data via write-function. More... | |
| virtual void | setFrequency (uint32_t hz)=0 |
| Sets the speed. More... | |
| virtual void | setFilter (uint32_t filterBank, uint32_t messageId, uint32_t messageIdMask)=0 |
| Sets a message hardware receive filter. More... | |
| Public Member Functions inherited from semf::CommunicationHardwareAsynchronous | |
| virtual | ~CommunicationHardwareAsynchronous ()=default |
| Type | type () const override |
| Returns the hardware type. More... | |
| void | setFrame (Frame frame) final |
| Sets the selected usage of start and stop condition. More... | |
| Public Member Functions inherited from semf::CommunicationHardware | |
| virtual | ~CommunicationHardware ()=default |
| virtual void | init ()=0 |
| virtual void | deinit ()=0 |
| virtual Type | type () const =0 |
| Returns the hardware type. More... | |
| virtual void | setFrame (Frame frame)=0 |
| Sets the selected usage of start and stop condition. More... | |
| Public Member Functions inherited from semf::app::Communication | |
| virtual | ~Communication ()=default |
| virtual void | write (const uint8_t data[], size_t dataSize)=0 |
For writing data, dataWritten signal will be emitted after successful write. More... | |
| virtual void | read (uint8_t buffer[], size_t bufferSize)=0 |
For reading data, dataAvailable signal will be emitted after successful read. More... | |
| virtual void | stopRead ()=0 |
| virtual void | stopWrite ()=0 |
| virtual bool | isBusyReading () const =0 |
| Communication hardware is busy reading at the moment. More... | |
| virtual bool | isBusyWriting () const =0 |
| Communication hardware is busy writing at the moment. More... | |
| Public Member Functions inherited from semf::LinkedQueue< T >::Node | |
| virtual | ~Node ()=default |
| T * | next () const |
| Returns a pointer to the next element in a queue. More... | |
| void | setNext (T *next) |
| Sets a pointer to the next element in a list. More... | |
| bool | isInQueue (LinkedQueue &queue) |
Returns if a node is part of this LinkedQueue. More... | |
Static Public Member Functions | |
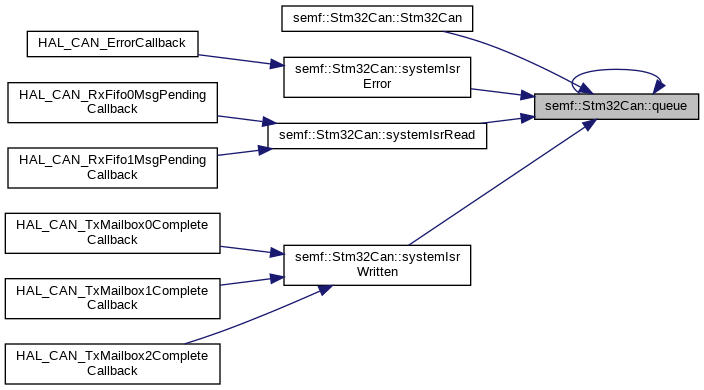
| static LinkedQueue< Stm32Can > * | queue () |
| Get the list with all cans. More... | |
| static void | systemIsrRead (CAN_HandleTypeDef &can, uint8_t fifoId) |
| System-wide interrupt service routine for can receive. More... | |
| static void | systemIsrWritten (CAN_HandleTypeDef &can, uint8_t mailboxId) |
| System-wide interrupt service routine for can transmit. More... | |
| static void | systemIsrError (CAN_HandleTypeDef &can) |
| System-wide interrupt service routine for can error. More... | |
Protected Member Functions | |
| void | writeHardware (const uint8_t data[], size_t dataSize) override |
| Hardware will write data. More... | |
| void | requestHardware () override |
| Protected Member Functions inherited from semf::CanHardware | |
| void | setBusyWriting (bool isBusy) |
| Sets the busy flag for writing. More... | |
| virtual void | setReadBuffer (uint8_t buffer[], size_t bufferSize)=0 |
| Sets the read buffer for having the possibility to handle the received data. More... | |
| virtual void | writeHardware (const uint8_t data[], size_t dataSize)=0 |
| Hardware will write data. More... | |
| virtual void | requestHardware ()=0 |
| void | onDataWritten () |
| void | onDataAvailable () |
| void | onError (Error thrown) |
Is called if an error occurred by hardware read or write access. Will emit error signal. More... | |
| void | onDataRequested () |
Additional Inherited Members | |
| Public Attributes inherited from semf::Can | |
| Signal | dataRequested |
| Public Attributes inherited from semf::app::Communication | |
| Signal | dataWritten |
| Signal | dataAvailable |
| Signal | writeStopped |
| Signal | readStopped |
| Signal< Error > | error |
Class for using CAN with Stm32.
start(). Definition at line 25 of file stm32can.h.
|
strong |
Error codes for this class. Error ID identify a unique error() / onError call (excluding transferring).
Definition at line 29 of file stm32can.h.
|
explicit |
Constructor.
| hwHandle | can hardware interface |
Definition at line 44 of file stm32can.cpp.

|
explicitdelete |
|
virtualdefault |
|
overridevirtual |
Deinitializes the hardware
| Deinit_HalError | If the ST-HAL stumbles upon an error. |
| Deinit_HalBusy | If the ST-HAL is busy. |
| Deinit_HalTimeout | If the ST-HAL times out. |
Implements semf::CommunicationHardware.
Definition at line 75 of file stm32can.cpp.

| void semf::Stm32Can::enterDeepPowerDownMode | ( | ) |
Go to deep power down mode.
| EnterDeepPowerDownMode_SleepStateReadyListeningHalError | If sleep returns a hal error. |
| EnterDeepPowerDownMode_SleepStateReadyListeningHalBusy | If sleep returns a hal busy. |
| EnterDeepPowerDownMode_SleepStateReadyListeningHalTimeout | If sleep returns a hal timeout. |
| EnterDeepPowerDownMode_InitStateResetSleepPendingHalError | If init returns a hal error. |
| Enterdeeppowerdownmode_Initstateresetsleeppendinghalbusy | If init returns a hal busy. |
| EnterDeepPowerDownMode_InitStateResetSleepPendingHalTimeout | If init returns a hal timeout. |
| EnterDeepPowerDownMode_StartStateResetSleepPendingHalError | If start returns a hal error. |
| EnterDeepPowerDownMode_StartStateResetSleepPendingHalBusy | If start returns a hal busy. |
| EnterDeepPowerDownMode_StartStateResetSleepPendingHalTimeout | If start returns a hal timeout. |
| EnterDeepPowerDownMode_SleepStateResetSleepPendingHalError | If sleep returns a hal error. |
| EnterDeepPowerDownMode_SleepStateResetSleepPendingHalBusy | If sleep returns a hal busy. |
| EnterDeepPowerDownMode_SleepStateResetSleepPendingHalTimeout | If sleep returns a hal timeout. |
Definition at line 179 of file stm32can.cpp.

|
overridevirtual |
Initializes the hardware.
| Init_HalError | If the ST-HAL stumbles upon an error. |
| Init_HalBusy | If the ST-HAL is busy. |
| Init_HalTimeout | If the ST-HAL times out. |
Implements semf::CommunicationHardware.
Definition at line 50 of file stm32can.cpp.

| void semf::Stm32Can::isrError | ( | CAN_HandleTypeDef & | can | ) |
Sending a error signal.
| can | Pointer to CAN hardware handler. |
Definition at line 468 of file stm32can.cpp.

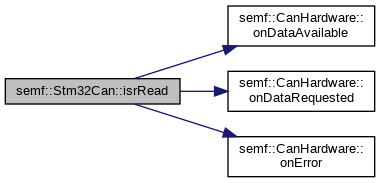
| void semf::Stm32Can::isrRead | ( | CAN_HandleTypeDef & | can, |
| uint8_t | fifoId | ||
| ) |
Saves a received message and sends a readyRead or readyRequested signal.
| can | Pointer to CAN hardware handler. |
| fifoId | FIFO ID of the received message. |
| IsrRead_NullpointerReadBuffer | Read data is not set. |
| IsrRead_FifoIdInvalid | If FIFO-id is invalid. |
| IsrRead_HalError | If ST-HAL returns hal error. |
| IsrRead_HalBusy | If ST-HAL returns hal busy. |
| IsrRead_HalTimeout | If ST-HAL returns hal timeout. |
Definition at line 403 of file stm32can.cpp.
| void semf::Stm32Can::isrWritten | ( | CAN_HandleTypeDef & | can, |
| uint8_t | mailboxId | ||
| ) |
Sending a readyWritten signal.
| can | Pointer to CAN hardware handler. |
| mailboxId | Id of mailbox where message was written from. |
Definition at line 455 of file stm32can.cpp.

| bool semf::Stm32Can::isStarted | ( | ) | const |
Get the state of the start of the CAN driver.
Definition at line 121 of file stm32can.cpp.
|
overridevirtual |
Returns the message ID for reading data. Use this function after reading the data via read-function.
Implements semf::Can.
Definition at line 126 of file stm32can.cpp.

|
static |
Get the list with all cans.
Definition at line 379 of file stm32can.cpp.

| void semf::Stm32Can::releaseDeepPowerDownMode | ( | ) |
Go to active mode.
| ReleaseDeepPowerDownMode_WakeupStateSleepActiveHalError | If wakeup returns a hal error. |
| ReleaseDeepPowerDownMode_WakeupStateSleepActiveHalBusy | If wakeup returns a hal busy. |
| ReleaseDeepPowerDownMode_WakeupStateSleepActiveHalTimeout | If wakeup returns a hal timeout. |
| ReleaseDeepPowerDownMode_InitStateResetSleepPendingHalError | If init returns a hal error. |
| ReleaseDeepPowerDownMode_InitStateResetSleepPendingHalBusy | If init returns a hal busy. |
| ReleaseDeepPowerDownMode_InitStateResetSleepPendingHalTimeout | If init returns a hal timeout. |
| ReleaseDeepPowerDownMode_StartStateResetSleepPendingHalError | If start returns a hal error. |
| ReleaseDeepPowerDownMode_StartStateResetSleepPendingHalBusy | If start returns a hal busy. |
| ReleaseDeepPowerDownMode_StartStateResetSleepPendingHalTimeout | If start returns a hal timeout. |
| ReleaseDeepPowerDownMode_StartStateError | If illegal state got reached. |
| ReleaseDeepPowerDownMode_StartStateInvalid | If illegal state got reached. |
Definition at line 288 of file stm32can.cpp.

|
overrideprotectedvirtual |
Hardware will request data on specific id. Id can be set by calling setMessageId().
| RequestHardware_InvalidMessageId | If message id is invalid. |
| RequestHardware_HalError | If ST-HAL returns HAL error. |
| RequestHardware_HalBusy | If ST-HAL returns HAL busy. |
| RequestHardware_HalTimeout | If ST-HAL returns HAL timeout. |
| RequestHardware_NotStarted | If ST-HAL not started. |
Implements semf::CanHardware.
Definition at line 540 of file stm32can.cpp.

|
overridevirtual |
Sets a message hardware receive filter.
| filterBank | Index of filter bank. |
| messageId | Message id for allowing to receive. |
| messageIdMask | Message id range for allowing to receive. |
| SetFilter_IndexOutOfBounds | If index is too high. |
| SetFilter_MessageIdInvalid | If message id is invalid. |
| SetFilter_MessageIdMaskInvalid | If the mask of the messageID is invalid. |
Implements semf::Can.
Definition at line 145 of file stm32can.cpp.
|
overridevirtual |
Sets the speed.
| hz | frequency in hz |
Implements semf::Can.
Definition at line 137 of file stm32can.cpp.
|
overridevirtual |
Sets the message ID for writing data. Use this function before writing the data via write-function.
| id | message ID of read data |
Implements semf::Can.
Definition at line 131 of file stm32can.cpp.
|
overridevirtual |
Sets the read buffer for having the possibility to handle the received data.
| buffer | Buffer to store received bytes in. |
| bufferSize | Size of receive buffer. |
Implements semf::CanHardware.
Definition at line 101 of file stm32can.cpp.
| void semf::Stm32Can::start | ( | ) |
Hardware driver will be started.
| Start_HalTimeout | If the ST-HAL times out. |
| Start_HalNotInitialized | If the ST-HAL is not initialized. |
Definition at line 595 of file stm32can.cpp.

| void semf::Stm32Can::stop | ( | ) |
Hardware driver will be stopped.
| Stop_HalTimeout | If the ST-HAL times out. |
Definition at line 623 of file stm32can.cpp.

|
overridevirtual |
Stops the read process as fast as possible without destroying anything. The readStopped Signal gets emitted if the call was successful.
Implements semf::app::Communication.
Definition at line 114 of file stm32can.cpp.
|
overridevirtual |
Stops the write process as fast as possible without destroying anything. The writeStopped Signal gets emitted if the call was successful.
Implements semf::app::Communication.
Definition at line 107 of file stm32can.cpp.
|
static |
System-wide interrupt service routine for can error.
| can | Hardware handler. |
Definition at line 397 of file stm32can.cpp.


|
static |
System-wide interrupt service routine for can receive.
| can | Hardware handler. |
| fifoId | Id message has read into. |
Definition at line 385 of file stm32can.cpp.

|
static |
System-wide interrupt service routine for can transmit.
| can | Hardware handler. |
| mailboxId | Id of mailbox where message was written from. |
Definition at line 391 of file stm32can.cpp.

|
overrideprotectedvirtual |
Hardware will write data.
| data | data array |
| dataSize | data array size |
| WriteHardware_InvalidMessageId | If message id is invalid. |
| WriteHardware_HalError | If ST-HAL returns HAL error. |
| WriteHardware_HalBusy | If ST-HAL returns HAL busy. |
| WriteHardware_HalTimeout | If ST-HAL returns HAL timeout. |
| WriteHardware_NotStarted | If ST-HAL not started. |
Implements semf::CanHardware.
Definition at line 477 of file stm32can.cpp.

